Xuanbin Peng 彭宣滨
Email: xup006[at]ucsd.edu
Office: Jacobs 4511
I am currently a researcher at University of California, San Diego (UCSD) advised by Prof. Xiaolong Wang.
My research interest lies in the intersection of robotics, perception, planning, reasoning, and decision-making, with their application in complex, real-world environments.
While immersed in the academic field, I also appreciate letting loose by playing basketball and table tennis during my spare time. Furthermore, philosophy and poetry also interest me a lot.
I remain open and eager to collaborate with like-minded individuals to discover the potential and possibilities of robotics across various fields.
LinkedIn | Github | Twitter | Google Scholar

Research
My current research interest lies in data-centric learning, compositionality, mobile manipulation and whole-body control. My long-term goal is to develop general-purpose intelligent robots that can infer and interact with the dynamic and open world environment over long-horizon with adaptability, generalizability, dexterity, and safety.
* denotes equal contribution

Exbody2: Advanced Expressive Humanoid Whole-Body Control
Mazeyu Ji*, Xuanbin Peng*, Fangchen Liu, Ge Yang, Jialong Li, Xuxin Cheng, Xiaolong Wang
A generalized whole-body tracking framework that can take any reference motion inputs and control the humanoid to mimic the motion.

WildLMa: Long Horizon Loco-Manipulation in the Wild
Ri-Zhao Qiu*, Yuchen Song*, Xuanbin Peng*, Sai Aneesh Suryadevara, Ge Yang, Minghuan Liu, Mazeyu Ji, Chengzhe Jia, Ruihan Yang, Xueyan Zou, Xiaolong Wang
Integrate an LLM-based high-level planner, an imitation learning skill library, and a learned whole-body controller for in-the-wild loco-manipulation over long-horizon.
IEEE International Conference on Robotics and Automation (ICRA) 2025.
Yahoo News / Interesting Engineering / Gadgets360 / TechXplore
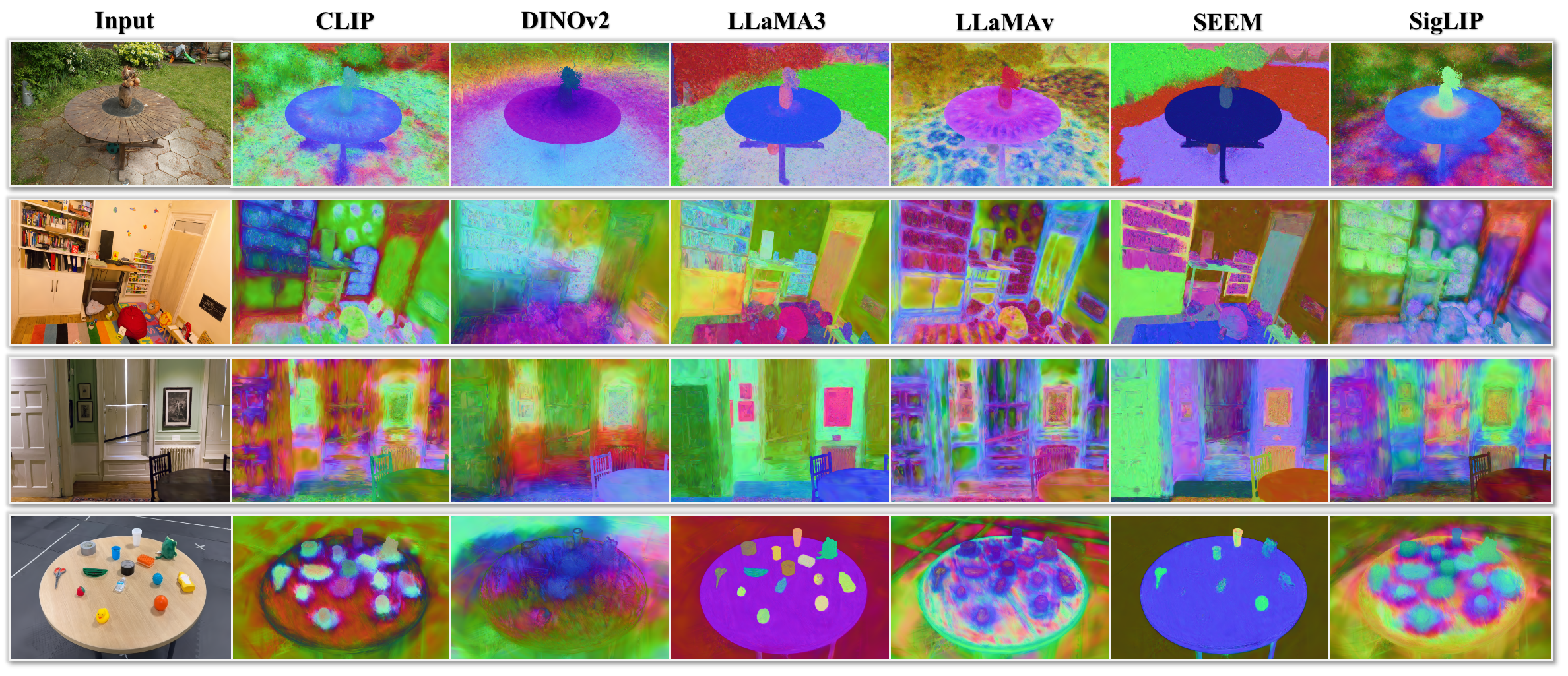
3D-Spatial Multimodal Memory
Xueyan Zou, Yuchen Song, Ri-zhao Qiu, Xuanbin Peng, Jianglong Ye, Sifei Liu, Xiaolong Wang
Integrate embeddings from foundation models and 3D Gaussian Splatting to restore rich semantic knowledge and 3D-sptial information.
The International Conference on Learning Representations (ICLR) 2025.
Academic Services
Journal Reviewer:
- IEEE Robotics and Automation Letters (RAL), 2024
Conference Reviewer:
- IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
- Conference on Robot Learning (CoRL), 2025
- Robotics: Science and Systems (RSS), 2025