Xuanbin Peng 彭宣滨
Email: xup006[at]ucsd.edu
Office: Jacobs 4511
I am a PhD student at University of California, San Diego (UCSD) advised by Prof. Xiaolong Wang.
My research focuses on enabling robots to physically interact with complex real-world environments.
I am open to collaborations across robotics and related fields. Outside of research, I enjoy basketball, skiing, and photography.
LinkedIn | Github | Twitter | Google Scholar

Research
I study how robots can learn to perceive, reason, and physically interact with the world. My current focus areas include whole-body control, mobile manipulation, and data-centric learning. My long-term goal is to build general-purpose robots that can infer and interact with dynamic, open-world environments over long horizons with adaptability, generalizability, dexterity, and safety.
* denotes equal contribution
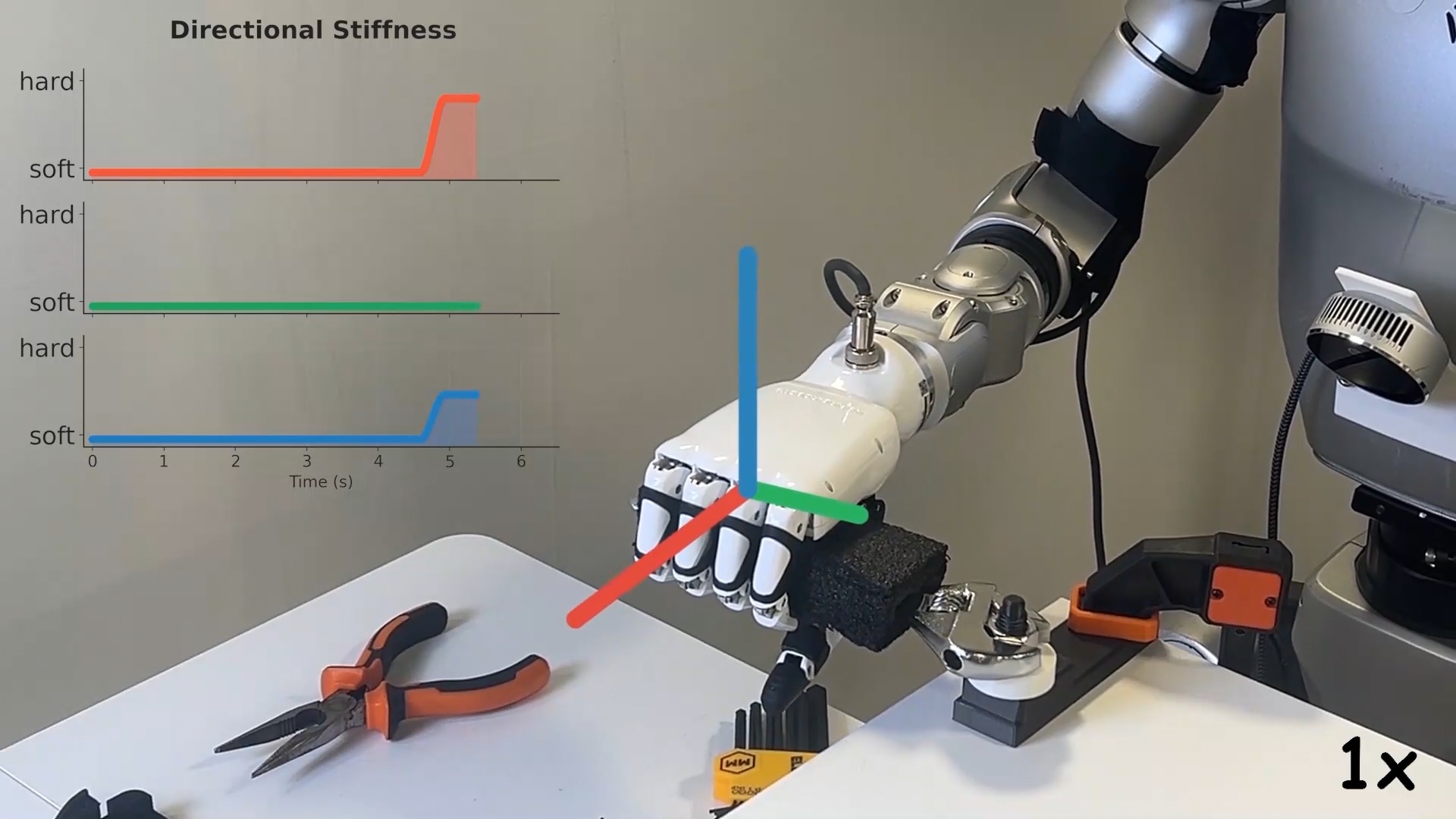
HMC: Learning Heterogeneous Meta-Control for Contact-Rich Loco-Manipulation
Lai Wei*, Xuanbin Peng*, Ri-Zhao Qiu, Tianshu Huang, Xuxin Cheng, Xiaolong Wang
A unified framework that adaptively stitches position, impedance, and force-position control for contact-rich loco-manipulation.
International Conference on Robotics and Automation (ICRA), 2026. RSS 2025 Workshop on WCBM Spotlight.
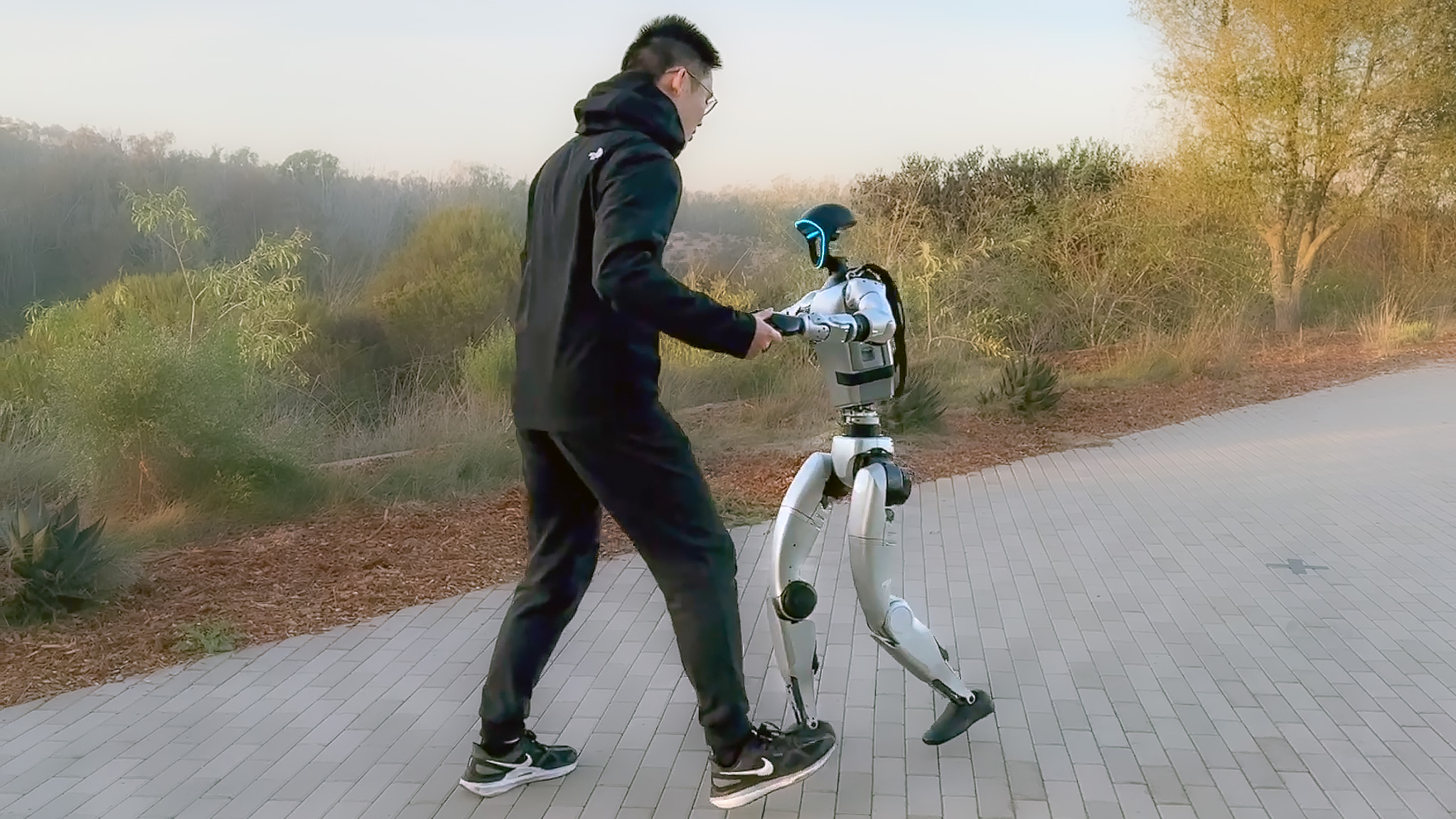
Exbody2: Advanced Expressive Humanoid Whole-Body Control
Mazeyu Ji*, Xuanbin Peng*, Fangchen Liu, Ge Yang, Jialong Li, Xuxin Cheng, Xiaolong Wang
A generalized whole-body tracking framework that can take any reference motion inputs and control the humanoid to mimic the motion.
International Conference on Robotics and Automation (ICRA), 2026. RSS 2025 Workshop on WCBM Spotlight.

WildLMa: Long Horizon Loco-Manipulation in the Wild
Ri-Zhao Qiu*, Yuchen Song*, Xuanbin Peng*, Sai Aneesh Suryadevara, Ge Yang, Minghuan Liu, Mazeyu Ji, Chengzhe Jia, Ruihan Yang, Xueyan Zou, Xiaolong Wang
Integrate an LLM-based high-level planner, an imitation learning skill library, and a learned whole-body controller for in-the-wild loco-manipulation over long-horizon.
IEEE International Conference on Robotics and Automation (ICRA) 2025.
Yahoo News / Interesting Engineering / Gadgets360 / TechXplore

GMT: General Motion Tracking for Humanoid Whole-Body Control
Zixuan Chen*, Mazeyu Ji*, Xuxin Cheng, Xuanbin Peng, Xue Bin Peng, Xiaolong Wang
A unified humanoid control framework that uses adaptive sampling and mixture-of-experts to track diverse whole-body motions in real-world settings.
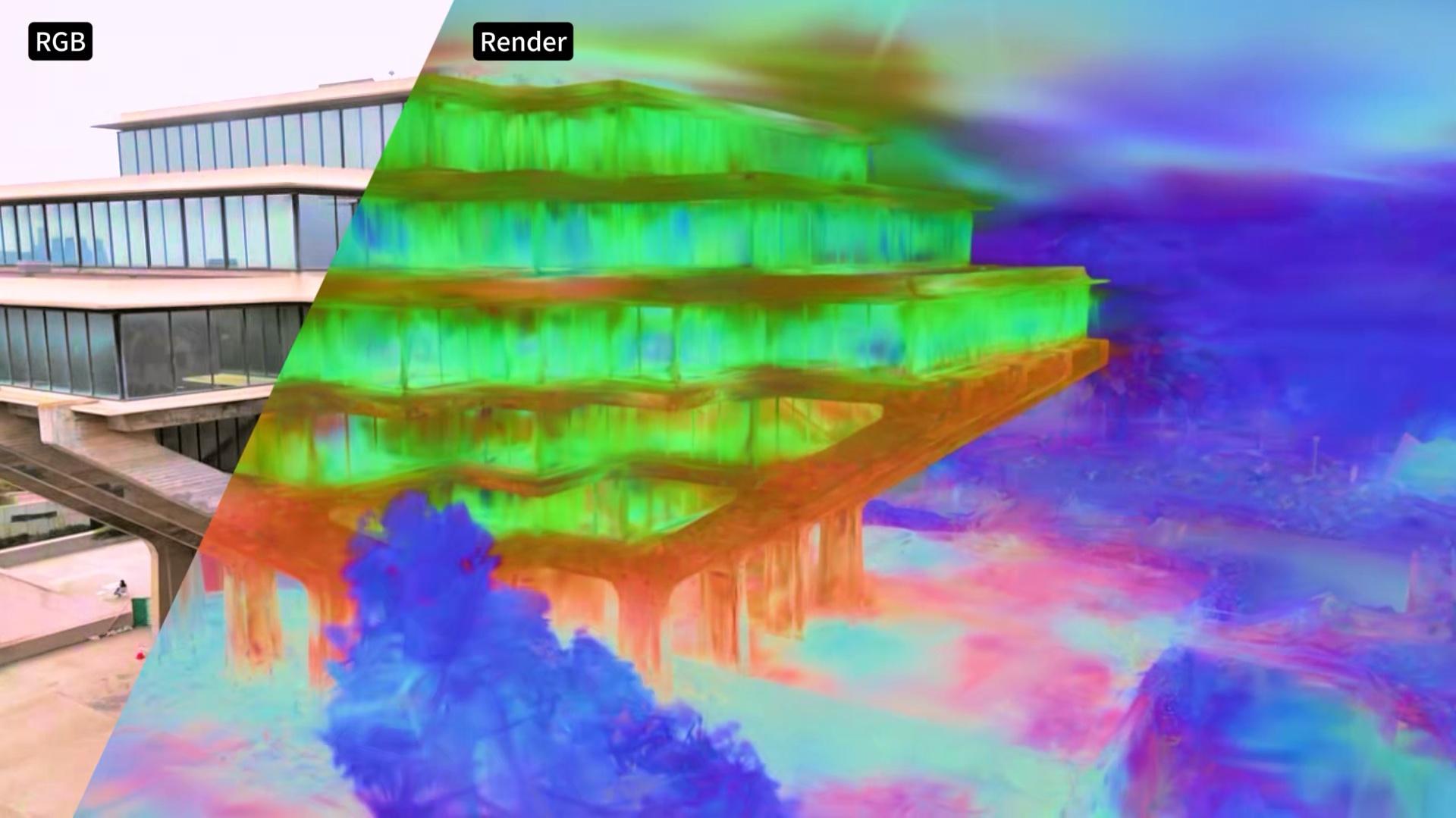
3D-Spatial Multimodal Memory
Xueyan Zou, Yuchen Song, Ri-zhao Qiu, Xuanbin Peng, Jianglong Ye, Sifei Liu, Xiaolong Wang
Integrate embeddings from foundation models and 3D Gaussian Splatting to restore rich semantic knowledge and 3D-spatial information.
The International Conference on Learning Representations (ICLR) 2025.
Academic Services
Journal Reviewer:
- IEEE Robotics and Automation Letters (RAL), 2024
Conference Reviewer:
- IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025,2026
- International Conference on Robotics and Automation (ICRA), 2026
- Conference on Robot Learning (CoRL), 2025, 2026
- Robotics: Science and Systems (RSS), 2025